
О семинаре
22-23 сентября 2016, в Университете Иннополис состоялся третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016), целью которого являлось представление новых результатов и обмен опытом между специалистами в области искусственного интеллекта, робототехники, беспилотных транспортных средств.
Семинар был организован Российской ассоциацией искусственного интеллекта при поддержке Университета Иннополис.
В программный комитет семинара вошли следующие специалисты в области искусственного интеллекта и робототехники:
В.Е. Павловский (со-председатель), доктор физико-математических наук, профессор, главный научный сотрудник Института прикладной математики им. М.В. Келдыша РАН, член научного совета Российской ассоциации искусственного интеллекта.
С.Б. Ткачев, доктор физико-математических наук, профессор, лауреат премии правительства РФ в области науки и техники, профессор кафедры "Математическое моделирование" МГТУ им. Н.Э. Баумана.
Д.А. Добрынин, кандидат технических наук, старший научный сотрудник Федерального исследовательского центра «Информатика и управление» Российской академии наук, член Российской ассоциации искусственного интеллекта, финалист конкурса беспилотных летающих роботов КРОК-2013.
В.Э. Карпов, кандидат технических наук, доцент, начальник лаборатории робототехники НИЦ "Курчатовский институт", вице-президент Российской ассоциации искусственного интеллекта.
Н.В. Ким, кандидат технических наук, профессор, лауреат премии правительства РФ в области образования, профессор кафедры 704 факультета №7 «Робототехнические и интеллектуальные системы» Московского авиационного института.
К.С. Яковлев (со-председатель), кандидат физико-математических наук, старший научный сотрудник Федерального исследовательского центра «Информатика и управление» Российской академии наук, финалист конкурса беспилотных летающих роботов КРОК-2013, член научного совета Российской ассоциации искусственного интеллекта.
Е.А. Магид, доктор технических наук, профессор кафедры Интеллектуальной Робототехники Высшей школы ИТИС, Казанский Федеральный Университет
И.М. Афанасьев, кандидат технических наук, доцент Института Робототехники, Университет Иннополис.
На семинар поступило 27 докладов, было принято 17 докладов, которые (наряду с расширенными тезисами 2-х приглашенных докладов) были опубликованы в сборнике трудов семинара.
В рамках семинара состоялся круглый стол Фонда перспективных исследований "Автономные малоразмерные высокоманевренные беспилотные летательные аппараты мультироторного типа".
В семинаре приняли участие представители ведущих научных, образовательных и экспертных организаций РФ (и Республики Беларусь):
- Федеральный исследовательский центр «Информатика и управление» Российской академии наук (г. Москва);
- Институт прикладной математики им. М.В. Келдыша Российской академии наук (г. Москва);
- Институт проблем управления Российской академии наук (г. Москва);
- Национальный исследовательский центр «Курчатовский институт», (г. Москва);
- Университет Иннополис (г. Иннополис, Республика Татарстан);
- Главный научно-исследовательский испытательный центр робототехники Министерства обороны Российской Федерации (г. Москва);
- Фонд перспективных исследований (г. Москва);
- Московский авиационный институт (г. Москва);
- Московский физико-технический институт (г. Москва);
- Российский университет дружбы народов (г. Москва);
- Казанский федеральный университет (г. Казань);
- Казанский национальный исследовательский технический университет им. А.Н. Туполева (г. Казань);
- Владимирский государственный университет имени А.Г. и Н.Г. Столетовых (г. Владимир);
- Брянский государственный технический университет (г. Брянск);
- Нижегородский государственный технический университет им. Р. Е. Алексеева (г. Нижний Новгород);
- Юго-западный государственный университет (г. Курск);
- Севастопольский государственный университет (г. Севастополь);
- Объединённый институт проблем информатики НАН Беларуси (г. Минск, Республика Беларусь);
- и др.
Фотографии семинара


























Материалы
 Сборник трудов на eLibrary
Сборник трудов на eLibrary
Приглашенные доклады
Интеллектуальные транспортные системы: прошлое, настоящее, будущее
Я.А. Холодов
Университет Иннополис, г. Иннополис
Московский физико-технический институт, г. Москва
"Интеллектуальные транспортные системы" (ИТС) - это системная интеграция современных информационных и коммуникационных технологий и средств автоматизации с транспортной инфраструктурой, транспортными средствами и пользователями, ориентированная на повышение безопасности и эффективности транспортного процесса, комфортности для водителей и пользователей транспорта. Использование ИТС в мире происходит в общественном транспорте, при повышении безопасности дорожного движения, ликвидации заторов на дорогах, повышения производительности транспортных систем.
Библиографическая ссылка:
Холодов Я.А. Интеллектуальные транспортные системы: прошлое, настоящее, будущее // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 6.
Биологически инспирированные подходы в робототехнике
В.Э. Карпов
НИЦ "Курчатовский институт", г. Москва
В докладе рассматривается верификационный аспект биоинспирированности. Изучение особенностей поведения роботов, обладающих эмоциональной-темпераментной компонентой привело к выводу о том, что на этой базе вполне адекватно реализуются самые разнообразные поведенческие феномены, в частности – поведение зомбированного паразитами индивида, а также то, что в психиатрии называется раздвоением личности.
Библиографическая ссылка:
Карпов В.Э. Биологически инспирированные подходы в робототехнике // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 7.
Доклады
1. Планирование маршрута для беспилотного наземного робота с учетом множества критериев оптимизации
P.O. Лавреновa, И.М. Афанасьевa, Е.А. Магидb
aУниверситет Иннополис
bКазанский федеральный университет
Поиск оптимального маршрута движения для беспилотного транспортного средства является сложной задачей робототехники, требующей комплексного подхода. Основными критериями оценки качества алгоритма построения маршрута являются скорость выполнения поиска и оптимальность полученного для робота пути относительно различных, задаваемых пользователем, параметров оптимизации. В данной статье описан подход к планированию маршрута, позволяющий построить предварительный маршрут движения, а затем его динамически корректировать в режиме реального времени путем изменения весовых функций для различных параметров оптимизации. Мы представляем набор ключевых параметров оптимизации маршрута и результаты работы разработанного алгоритма в среде MATLAB.
Библиографическая ссылка:
Лавренов Р.О., Афанасьев И.М., Магид Е.А. Планирование маршрута для беспилотного наземного робота с учетом множества критериев оптимизации // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 10-20.
2. ROS-моделирование взаимодействия БПЛА и наземного робота для решения задачи планирования маршрута в статической среде
A.Р. Габдуллинa, A.К. Буйвалa, P.O. Лавреновab, Е.А. Магидb
aУниверситет Иннополис
bКазанский федеральный университет
Для эффективной навигации беспилотного наземного робота (БНР) необходимо иметь полноценную карту местности, которая во многих случаях недоступна и по разным причинам не может быть построена самим БНР. Задача картографирования может быть облегчена путем привлечения беспилотных летательных аппаратов (БПЛА), действующих совместно с БНР. В статье описываются особенности программного решения для кооперации БНА с несколькими БПЛА для задачи совместного построения трехмерных карт, получаемых с воздуха, и дальнейшее построение маршрута БНР с использованием полученной карты. Программная реализация алгоритмов осуществлена в среде ROS с использованием симулятора Gazebo.
Библиографическая ссылка:
Габдуллин А.Р., Буйвал А.К., Лавренов Р.О., Магид Е.А. ROS-моделирование взаимодействия БПЛА и наземного робота для решения задачи планирования маршрута в статической среде // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 21-30.
3. Метод разрешения конфликтов при планировании пространственных траекторий для группы беспилотных летательных аппаратов
А.А. Андрейчукa, К.С. Яковлевb
aРоссийский университет дружбы народов
bФедеральный исследовательский центр "Информатика и управление" Российской академии наук
В работе рассматривается задача планирования совокупности траекторий для группы интеллектуальных агентов (беспилотных летательных аппаратов) в двухмерном случае. Исследуется децентрализованный подход к ее решению, когда процесс построения траекторий осуществляется независимо, а согласование и устранение конфликтов – централизовано. Предлагается новый метод разрешения конфликтов, использующий как механизмы задержки агентов, так и оригинальную процедуру локального перепланирования траектории.
Библиографическая ссылка:
Андрейчук А.А., Яковлев К.С. Метод разрешения конфликтов при планировании пространственных траекторий для группы беспилотных летательных аппаратов // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 31-40.
4. Решение траекторных задач для группы летательных аппаратов, основанное на правилах
М.В. Хачумов
Федеральный исследовательский центр "Информатика и управление" Российской академии наук
Рассматриваются две траекторные задачи в условиях возмущений: преследование цели и следование по заданному маршруту. В качестве объектов выступают беспилотные летательные аппараты (ЛА), математические модели которых задаются передаточными функциями. Задача преследования цели заключается в сближении группы ЛА, имеющей некоторое случайное расположение, с целью и полета рядом с ней в течение заданного периода времени. Цель, имеющая меньшую скорость, стремится уклониться от преследователей. В задаче отработки заданного маршрута каждый аппарат следует по своей траектории полета, заданной движением соответствующей эталонной («имитационной») цели. В процессе решения задач ЛА применяют некоторое множество стратегий поведения в возмущенной среде, реализуемых правилами выбора углов ориентации и скоростей полета. Приведены примеры основных групп правил для преследователя и структурная схема моделирования процесса преследования. В экспериментальной части работы моделируются ситуации, характерные для решения указанных задач.
Библиографическая ссылка:
Хачумов М.В. Решение траекторных задач для группы летательных аппаратов, основанное на правилах // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 41-49.
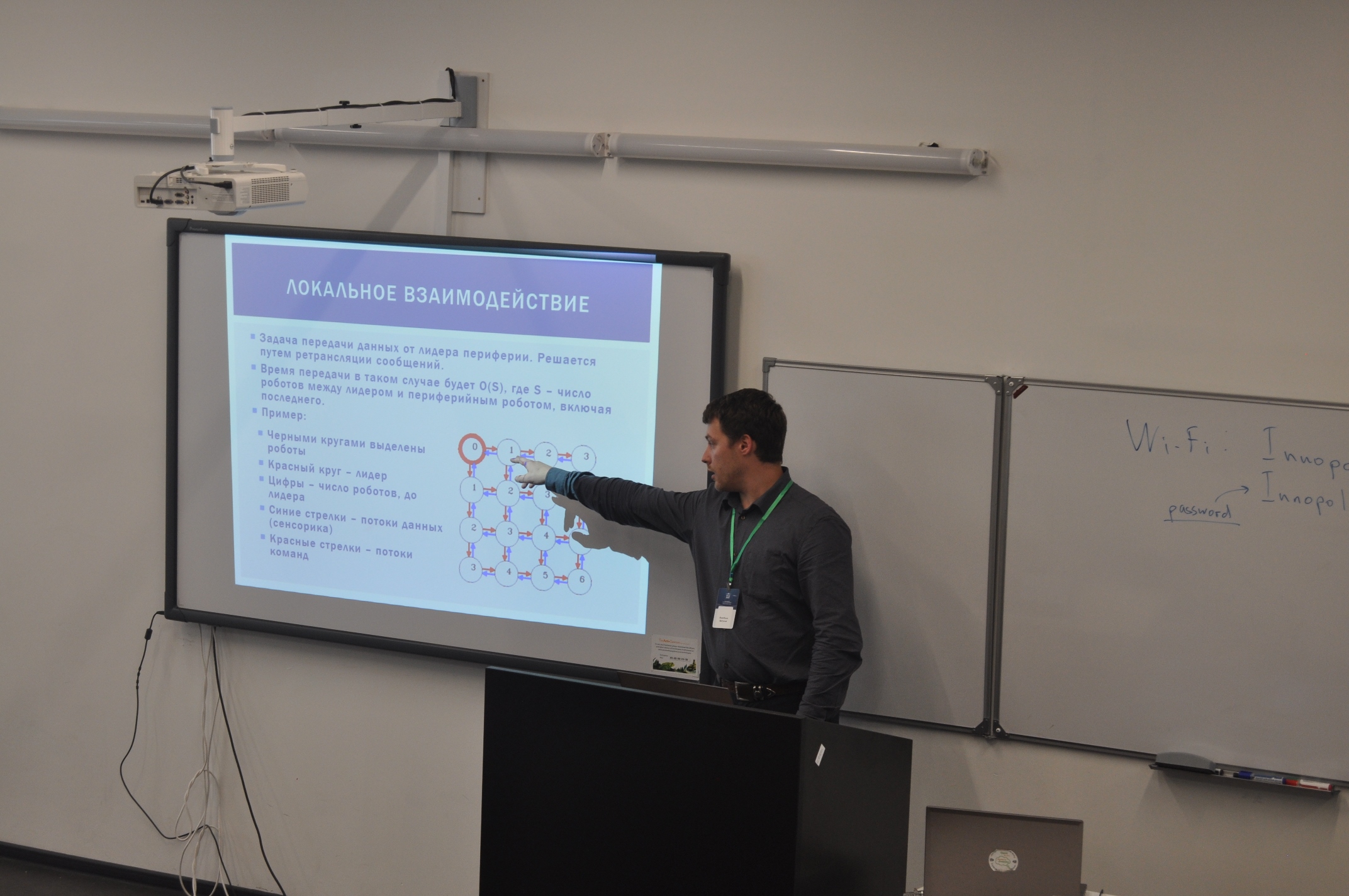
5. Алгоритм кластеризации коллектива роботов
В.В. Воробьев
НИЦ "Курчатовский институт"
В статье рассматривается вопрос применения механизмов роения для задач коллективной робототехники. Предлагается алгоритм, который инициализируется лидером роя и заключается в последовательном разделении роя на заданное количество кластеров и выборе лидера в каждом из полученных кластеров, используя только локальное взаимодействие. Процесс повторяется до тех пор, пока их число не станет равным заданному, при этом количество кластеров, получаемых за одну итерацию деления, зависит от количества соседей лидера.
Библиографическая ссылка:
Воробьев В.В. Алгоритм кластеризации коллектива роботов // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 50-59.
6. Модели стайного поведения роботов
А.А. Кулинич
Институт проблем управления Российской академии наук
Предложены модели стайного поведения агентов (роботов) на основе критериев возможности достижения цели и их взаимной полезности при выполнении совместных действий. Рассмотрены стайные алгоритмы «ленивых» и «эгоистичных» агентов.
Библиографическая ссылка:
Кулинич А.А. Модели стайного поведения роботов // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 60-69.
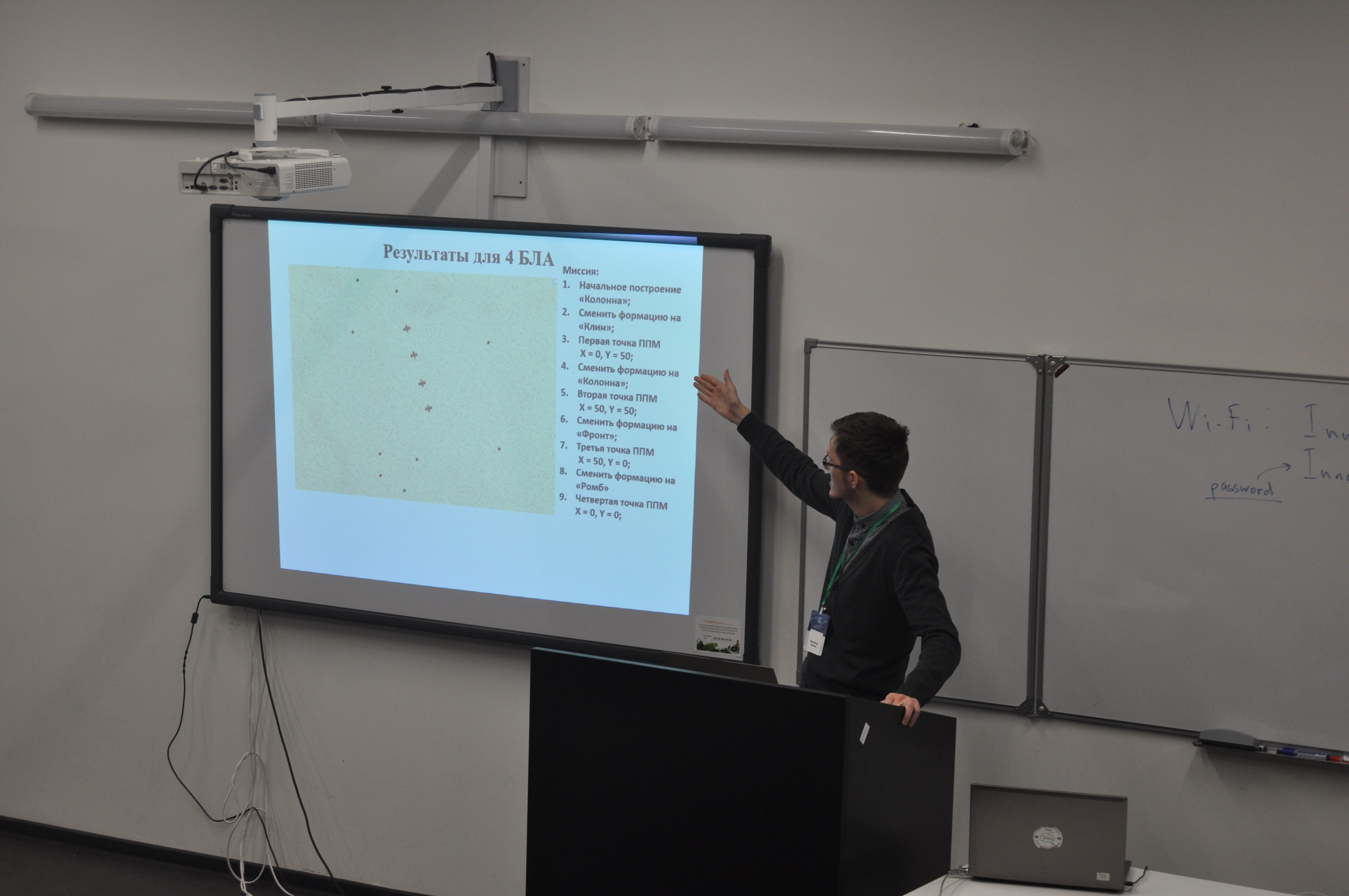
7. Алгоритм перестроений группы беспилотных летательных аппаратов с использованием автопилота Pixhawk
Н.А. Михайлов
Московский авиационный институт
В статье рассматривается практическая реализация алгоритмов управления автономным беспилотным летательным аппаратом в составе группы с использованием полетного контроллера Pixhawk. Рассматривается задача согласованного перестроения группы по заданным формациям. Каждый участник группы находится под управлением автопилота, который получает команды от бортового компьютера, на борту которого установлено программное обеспечение, реализующее алгоритмы управления. В работе представлена схема построения системы управления БПЛА. Проведено компьютерное моделирование. Результатом моделирования стали графики, демонстрирующие работоспособность алгоритмов.
Библиографическая ссылка:
Михайлов Н.А. Алгоритм перестроений группы беспилотных летательных аппаратов с использованием автопилота Pixhawk // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 70-79.
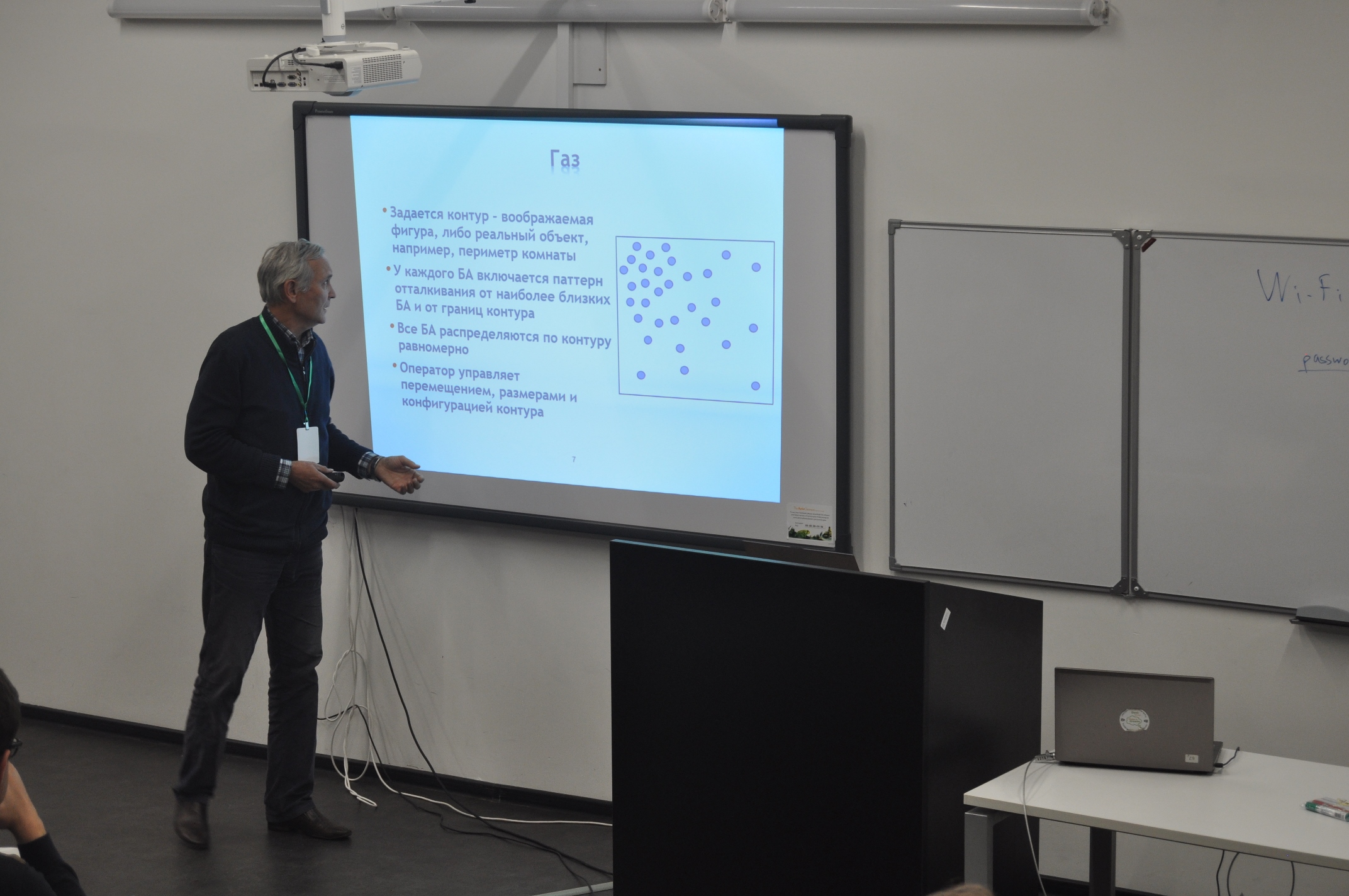
8. Децентрализованное управление группой беспилотных аппаратов на основе иммитации агрегатных состояний вещества
Р.Т. Сиразетдинов, С.В. Тихонов
Казанский национальный исследовательский технический университет им. А.Н. Туполева
В докладе рассматривается проблема организации автономного движения децентрализованной группы (стаи) беспилотных аппаратов, как множества материальных точек. Предлагаются алгоритмы распределенного управления, основанные на имитации группой беспилотных аппаратов различных агрегатных состояний вещества. Рассмотрены три «агрегатных состояния» группы: твердое, жидкое и газообразное. Исследованы вопросы устойчивости системы при различных вариантах алгоритмов имитации агрегатного состояния вещества. Затронуты вопросы оптимизации одномерного и плоского движения группы.
Библиографическая ссылка:
Сиразетдинов Р.Т.,Тихонов С.В. Децентрализованное управление группой беспилотных аппаратов на основе иммитации агрегатных состояний вещества // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 80-87.
9. Информационная система интеллектуального беспилотного автомобиля "АВТОНИВА"
В.Е. Павловский, К.И. Кий, И.А. Орлов, А.П. Алисейчик
Институт Прикладной Математики им. М.В. Келдыша Российской академии наук
В работе описаны функции и главные алгоритмы подсистемы СТЗ АвтоНИВА, работающей с цветными телевизионными изображениями. Данная подсистема основана на новом, специальном сжатом описании каждого кадра, которое позволяет решать задачи нахождения и распознавания объектов в реальном времени, минимизируя обращения к исходному массиву изображения на стандартном персональном компьютере. Описана система выделения препятствий на пути движения автомобиля по дальномерным данным. Работа выполнена в рамках проекта РФФИ.
Библиографическая ссылка:
Павловский В.Е., Кий К.И., Орлов И.А., Алисейчик А.П. Информационная система интеллектуального беспилотного автомобиля "АВТОНИВА" //Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 88-97.
10. Классификация дорожных ситуаций с помощью беспилотного летательного аппарата
Н.В. Ким, П.Д. Прохоров, Н.Е. Бодунков
Московский авиационный институт
В статье рассматривается использование беспилотных летательных аппаратов для автоматического мониторинга дорожного движения. Предложена методика классификации дорожных ситуаций по изображениям, полученных после дорожно-транспортного происшествия. Разработана иерархическая структура описания дорожной ситуации, наблюдаемой после произошедшего дорожно-транспортного происшествия. Для принятия решений о классе ситуаций предложено использовать продукционную модель представления знаний и соответствующую базу знаний. Приведен пример классификации ситуации по реальному изображению дорожного происшествия.
Библиографическая ссылка:
Ким Н.В., Прохоров П.Д., Бодунков Н. Е. Классификация дорожных ситуаций с помощью беспилотного летательного аппарата // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 98-107.
11. Бортовой узел ИСУ БЛА автономного выполнения задачи точной посадки и сброса груза
А.Р. Гамаюнов, Е.М. Притоцкий, М.С. Ходак
Владимирский государственный университет имени А.Г. и Н.Г. Столетовых
В статье предлагается вариант реализации бортового узла, расширяющего базовые возможности типовой СУ БЛА. Рассмотрена задача локального позиционирования над визуальной меткой при посадке и сбросе груза. Описана техническая и программная реализация.
Библиографическая ссылка:
Гамаюнов А.Р., Притоцкий Е.М., Ходак М.С. Бортовой узел ИСУ БЛА автономного выполнения задачи точной посадки и сброса груза // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 108-116.
12. Система позиционирования мобильного робота относительно разметки с применением средств нечёткой логики
П.С. Сорокоумов
НИЦ "Курчатовский институт"
Цель данной разработки — обеспечить позиционирование мобильного робота относительно края контрольной площадки при наличии строгих требований по ориентации и расстоянию до края по данным видеокамеры. Контрольная площадка по цвету резко контрастирует с окружающей местностью, что можно использовать для её распознавания. Позиционирование выполняется по данным видеокамеры с известными параметрами, установленной на роботе в известном положении, причём для упрощения формулировки задачи применены средства нечёткой логики.
Библиографическая ссылка:
Сорокоумов П.С. Система позиционирования мобильного робота относительно разметки с применением средств нечёткой логики // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 117-126.
13. Разработка системы технического зрения для сервисного мобильного робота
Г.А. Прокопович
Объединённый институт проблем информатики НАН Беларуси
Приводятся результаты экспериментов по разработке системы технического зрения, предназначенной для корректировки движения автономного мобильного робота по центру коридоров на основе данных от монокулярной камеры. Алгоритм выявления точки линейной перспективы основан на определении центра масс облака точек пересечения диагональных прямых, на которых лежат отрезки, найденные с помощью преобразования Хафа и образуемые краями и линиями цветовых переходов находятся в коридорах различных артефактов. Предложенный алгоритм протестирован на разработанном прототипе автономного мобильного робота с двухуровневой системой управления: нижний реализован на основе микроконтроллерной платы Arduino Mega, а верхний – на основе микрокомпьютера Raspberry Pi, управляющие программы для которых были смоделированы и сгенерированы в среде Simulink.
Библиографическая ссылка:
Прокопович Г.А. Разработка системы технического зрения для сервисного мобильного робота // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 127-136.
14. Об одном методе распознавания объектов с не полностью определенными признаками
А.Д. Московский
НИЦ "Курчатовский институт"
В работе описывается комплексный метод распознавания объектов на изображении в условиях неполноты входных данных, для задач навигации мобильных роботов. Представлен разработанный программный модуль для ROS, представлены результаты экспериментов, эмулированных в среде Gazebo.
Библиографическая ссылка:
Московский А.Д. Об одном методе распознавания объектов с не полностью определенными признаками // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 137-146.
15. Алгоритм управления беспилотным летательным аппаратом типа конвертоплан
С.Ф. Яцун, О.В. Емельянова, К.Г. Казарян
Юго-Западный государственный университет
В статье рассматривается управляемое движение беспилотного летательного аппарата (БПЛА) вертикального взлета и посадки, типа конвертоплан, с центрально расположенным управляемым приводом, причем поворотным является гондола с винтами и двигателями. Предложен алгоритм системы автоматического управления конвертопланом в основных режимах движения: взлете, горизонтальном полете и посадке. Представляемая работа выполнена в рамках проекта РФФИ "Изучение закономерностей движения прыгающе-летающего робота".
Библиографическая ссылка:
Яцун С.Ф., Емельянова О.В., Казарян К.Г. Алгоритм управления беспилотным летательным аппаратом типа конвертоплан // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 147-157.
16. Многопоточная реализация алгоритма визуальной локализации БПЛА на основе известной 3D модели окружения и технологии CUDA
А.К. Буйвал, М.А. Гавриленков
Брянский государственный технический университет
В статье приводится описание реализации с использованием технологии CUDA алгоритма визуальной локализации БПЛА внутри помещения на основе сопоставления граней, полученных из изображения с видеокамеры и из смоделированного изображения, полученного на основе известной 3D модели окружающей среды (помещения). В конце статьи дается сравнение производительности последовательной и многопоточной реализации на основе моделирования в среде Gazebo.
Библиографическая ссылка:
Буйвал А.К., Гавриленков М.А. Многопоточная реализация алгоритма визуальной локализации БПЛА на основе известной 3D модели окружения и технологии CUDA // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 158-168.
17. Нейроморфный чип «Алтай», ориентированный на применение в системах технического зрения, РТК и беспилотных транспортных средствах
В.М. Канглер, К.Е. Панченко
ООО “Мотив”
Рассмотрен проект создания нейроморфного чипа не фон Неймановской архитектуры, моделирующего импульсные нейронные сети (spiking neural networks) и ориентированного на использование во встраиваемых системах, в системах технического зрения и управления робототехническими комплексами. Обозначены ключевые проблемы современных вычислительных систем и недостатки фон Неймановской архитектуры. Продемонстрирована неэффективность существующих вычислительных архитектур в решении ряда задач и обоснована необходимость новой вычислительной архитектуры, которая должна вдохновляться примером человеческого мозга. Показана перспективность использования нейроморфной архитектуры. Перечислены типы задач, которые эффективно решаются с помощью искусственных нейронных сетей. Выражена фактическая безальтернативность использования аппарата искусственных нейронных сетей в решении неформализуемых и слабо формализуемых задач. Представлен нейроморфный чип “Алтай” и обозначены его ключевые преимущества. Обоснованы выбранный поход к обучению моделируемых нейронных сетей, а также целесообразность цифровой реализации по сравнению с аналогово-цифровой. Описаны используемая модель нейрона, архитектурные принципы, структура всего чипа, а также структура и функционирование отдельного нейроядра. Приведен ряд моделей применения разрабатываемого чипа в робототехнических комплексах и системах специального назначения.
Библиографическая ссылка:
Канглер В.М., Панченко К.Е. Нейроморфный чип «Алтай», ориентированный на применение в системах технического зрения, РТК и беспилотных транспортных средствах // Третий Всероссийский научно-практический семинар «Беспилотные транспортные средства с элементами искусственного интеллекта» (БТС-ИИ-2016, 22-23 сентября 2016 г., г. Иннополис, Республика Татарстан, Россия): Труды семинара. – М: Изд-во «Перо», 2016. – 184 с. C. 169-181.
Контакты
|
|
|
Константин Яковлев, председатель программного комитета,
|
